
Un peu d’électronique et de mécanique bien utile
Courants forts et courants faibles, moyenne et basse tension
La microélectronique est en plein développement et avec elle foisonnent les modules contenant des microcontrôleurs ou des capteurs intégrés dans des montages de plus en plus complexes.
Hérités des automates programmables industriels des années 1980 et des mécanismes d’asservissement mis en œuvre dans l’aéronautique notamment, tous les modules répondent à la logique de la chaîne de traitement capteur - calculateur - actionneur.
Le calculateur, dont la programmation est l’objet de cet ouvrage, est donc au croisement de deux univers. L’un est celui des actionneurs et de la puissance mécanique, électrique ou thermique qu’ils délivrent, et l’autre est celui des signaux, faibles la plupart du temps, que le calculateur doit détecter et analyser pour appliquer le comportement pour lequel il a été programmé.
La bonne compréhension de quelques principes courants en microélectronique permettra d’économiser du temps en mise au point du code. En effet, le fonctionnement à très basse tension de l’Arduino, sous 5 volts et même sous 3,3 volts pour certains modules, le rend incroyablement sensible aux perturbations électriques et aux mauvais contacts.
L’informatique embarquée, classe...
Les robots montrent leurs muscles : des courants forts et des tensions élevées
L’image de robots géants et puissants dans les films d’anticipation a remplacé peu à peu les actionneurs traditionnels que constituaient un aileron ou un train d’atterrissage d’avion de ligne, les vannes d’un barrage ou les moteurs à courant continu d’un train à grande vitesse. Cette puissance n’est possible qu’avec des moteurs nécessitant des courants forts et des tensions dont l’amplitude est modulée, sinon hachée, par des circuits numériques.
À une moindre échelle, la domotique et la robotique de loisir font appel à des courants significatifs et utilisent la tension du secteur ou l’alimentation de puissance en courant continu dans une plage de 12 à 24 volts. Ces tensions et ces courants sont incompatibles avec ce que peut délivrer un microcontrôleur comme l’Arduino et le contrôle des moteurs à l’aide d’un pont en H en est un exemple.
D’une manière générale, tout impulsion électromagnétique ou courant généré par la force contre-électromotrice est nuisible pour le microcontrôleur. Un découplage est impératif et la seule exception possible concerne la mise au point d’un montage utilisant...
Des signaux faibles
Les capteurs connectés aux microcontrôleurs se répartissent principalement en deux catégories :
-
Ceux dont les caractéristiques font en sorte qu’ils rendent compte des variations de leur environnement par un changement progressif de leur tension de sortie, de façon analogique .
-
Ceux qui restituent un état logique ou un niveau de tension obtenu par échantillonnage, de façon numérique.
Le point commun de ces deux types de capteurs est un fonctionnement sous une très basse tension. On appelle signal logique en électronique un signal correspondant à une tension. Les signaux logiques ne dépassent pas couramment 3,3 V ou 5 V selon le type de microcontrôleur utilisé, et il existe plusieurs « paliers » permettant de déterminer si le niveau est à l’état haut (HIGH) et correspond au 1 logique, ou s’il est à l’état bas (LOW) et correspond au zéro logique.
Les signaux TTL (Transistor-Transistor Logic) sont émis par des circuits à base de transistors bipolaires (d’où leur nom) et sont évalués sur une échelle de 0 à 5 V. Les circuits produisant des signaux d’une tension d’au plus 3,3 V permettent d’avoir une basse consommation tout en restant compatibles avec les circuits TTL sous...
Séparer les deux mondes
Plusieurs dizaines à quelques centaines de volts d’un côté et pas plus de 5 V de l’autre, ces deux caractéristiques opposées dans les montages à base de microcontrôleurs ne vont pas sans poser de problèmes.
La construction d’un robot, même de faible puissance, est un excellent apprentissage et une découverte de problèmes insoupçonnés. Pourtant, les électroniciens de formation ou praticiens le savent bien : l’environnement est constamment perturbé par des ondes électromagnétiques. Les spécialistes du son, de la radio ou de la mesure scientifique le savent encore mieux et certains informaticiens s’en doutent un peu, ne serait-ce que par la présence de code de détection d’erreurs dans les transmissions.
La généralisation des réseaux sans fil a fait passer à l’arrière-plan les réseaux filaires et leur gaine blindée. Les courants de surface, les effets de self et toutes sortes de parasites qui polluent les signaux que transportent toujours des câbles de connexion sont le plus souvent oubliés. Et pourtant, ils sont responsables des « resets » intempestifs des cartes Arduino, des valeurs erronées, des commutations intempestives et des surtensions...
Juste assez d’électronique pour faire marcher ses montages
Il est pratique d’avoir sous la main un aide-mémoire reprenant les schémas basiques et déjà pratiques, mais qui doivent prendre du temps pour être retrouvés. Avec la pratique, ils seront parfaitement connus, car ce sont les plus fréquemment utilisés en robotique, domotique ou arts créatifs.
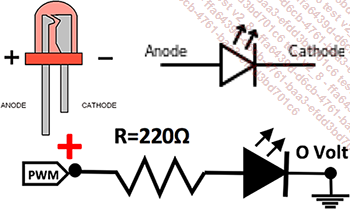
1. L’alimentation d’une LED
L’alimentation d’une LED, témoin lumineux très utile pour tester ou déboguer un montage ou pour simuler un actionneur, est incontournable et nécessite de ne retenir que deux choses :
-
La LED est polarisée et son anode (patte la plus longue) doit être reliée à une borne positive ou à un port de sortie de l’Arduino.
-
Le courant qui la traverse doit être limité par une résistance qui est fonction du type de LED. Une valeur de 200 ohms convient dans la plupart des cas.
2. Potentiomètre et poussoirs
Autre schéma très courant, le potentiomètre est assimilé à un pont diviseur avec des résistances qui varient selon le positionnement du curseur. Il est connecté aux bornes positives et négatives d’une alimentation et le point de mesure se situe au milieu.
Le convertisseur analogique/numérique de l’Arduino, positionné sur chaque port analogique...
La mécanique pour les non-mécaniciens
1. La transformation du mouvement
La transformation du mouvement est un des objets principaux de la mécanique et, il faut bien le reconnaître, la préoccupation première des concepteurs de robots. C’est vrai en particulier lors de la préparation de compétitions de type Trophées de la Robotique où une équipe doit réfléchir aux solutions techniques et mécaniques qui permettront de réaliser des actions à l’aide de mouvements.
Il est vivement recommandé de se procurer une bibliothèque ou un référentiel des mouvements et d’en faire une présentation. Une visite sur le site internet du musée des Techniques du Conservatoire national des arts et métiers apporte une bonne vue d’ensemble des mécanismes les plus simples comme les plus élaborés.
Comme il a été vu lors de la présentation de l’accéléromètre, deux mouvements principaux permettent d’effectuer tous les autres : la translation et la rotation. Ensuite, il est important de connaître ou de mesurer l’importance du mouvement, son intensité, qu’elle soit stable, c’est-à-dire sa vitesse, ou en évolution, en mesurant son accélération. Enfin, il faut avoir une idée de la force qu’il exerce par le déplacement d’une masse et la notion de couple intervient à cet instant.
Transformer le mouvement, si l’on considère la rotation et la translation, revient à étudier leurs combinaisons.
-
Transformer une translation en rotation suppose un assemblage par une bielle et une manivelle attachée au bord d’un disque. La translation va pousser la manivelle qui entraînera la bielle qui lui est solidaire par un axe. La poussée de la bielle s’effectuera dans une direction tangente au disque et le mettra en rotation....
