
Robots
Arduino Alvik
Le nouveau robot de la fondation Arduino est une carte d’extension conçue pour accueillir un Arduino 3,3 V au format Nano. Il est commercialisé avec un Arduino Nano ESP32 (en MicroPython), mais rien ne vous empêche de le remplacer par un autre modèle compatible.
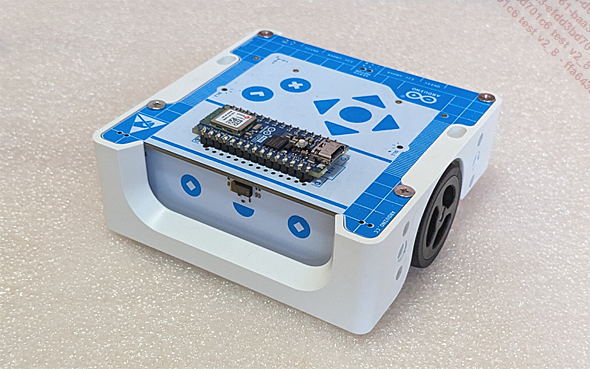
Le robot Arduino Alvik
Alvik est équipé de deux roues motrices et d’une roue libre (il s’agit en fait simplement d’une bille qui a la liberté de tourner dans n’importe quel sens). Il possède aussi une batterie 18650 rechargeable depuis le port USB de l’Arduino, sept boutons tactiles, deux LED RGB, un détecteur de proximité, trois capteurs de suivi de ligne, un gyroscope et accéléromètre (six axes) ainsi qu’un module de reconnaissance des couleurs.
Vous pouvez très facilement le customiser grâce à quatre connecteurs LEGO Technic et six inserts pour vis M3.
Il est également possible d’ajouter de nouveaux modules puisque les entrées/sorties de l’Arduino sont toujours disponibles (à l’aide de connecteurs Dupont) et que vous disposez aussi de deux connecteurs Grove I2C, deux connecteurs Qwiic I2C et deux connecteurs pour servomoteurs.
L’Arduino Nano ESP32 permet de programmer le robot Alvik en utilisant le langage MicroPython, le langage mBlock ou le langage Arduino.
1. Mise à jour du firmware
Avant toute chose, il est conseillé d’installer la dernière version du firmware MicroPython et de la bibliothèque Alvik. Pour cela, rendez-vous à l’adresse suivante : https://alvikupdate.arduino.cc/.
Reliez le port USB de l’Arduino Nano ESP32 à l’ordinateur, tout en laissant l’interrupteur du robot sur OFF).
Cliquez sur le bouton Connect, sélectionnez le port (COM7 dans cet exemple), puis cliquez sur Connexion et ensuite sur Update.
L’installation débute et au bout de quelques minutes, il vous est demandé d’allumer le robot. Patientez encore un peu. Après le redémarrage du robot, la mise à jour est terminée.
Vous pouvez débrancher l’Arduino et éteindre le robot.
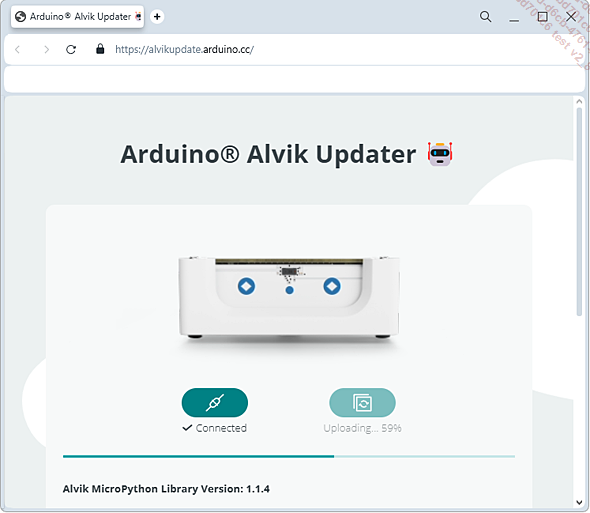
Mise à jour du firmware
2. mBlock
Les langages de blocs (comme Scratch) permettent d’initier les enfants (entre la fin de l’école...
Eliobot
Il s’agit d’un petit robot pédagogique créé par Romain Boutrois, un inventeur passionné (et français) que vous pouvez croiser toute l’année dans différents regroupements de Makers.
Par souci de transparence, nous préférons vous signaler que le robot Eliobot a été envoyé gratuitement à l’auteur, mais cela n’a aucune influence sur le contenu du livre.

Eliobot (V1.1)
Romain est ingénieur de formation, il a passé beaucoup de temps dans les fablabs et les associations à partager et construire des projets avec d’autres Makers et geeks. C’était la grande période des imprimantes RepRap, où tout le monde fabriquait des variantes ou même de nouveaux modèles. Les drones commençaient aussi à toucher le grand public. Il en a construit beaucoup, ce qui lui a permis de trouver ses premiers jobs dans des start-up dédiées aux drones. Il s’est ensuite mis à son compte pour accompagner les entreprises dans la conception et l’industrialisation de leurs produits. C’est ce qui lui a donné le temps et l’envie de concrétiser son grand projet : un robot pour faire découvrir la robotique aux enfants.
Avant d’arriver à la version actuelle (v1.1), il y a eu de nombreux prototypes et tests auprès du public.
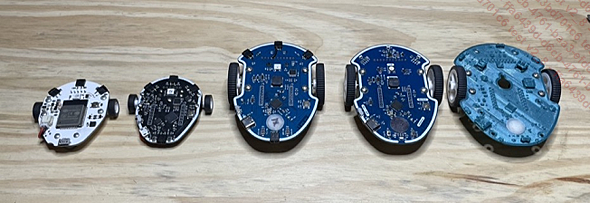
Prototypes d’Eliobot
Vous trouverez un test complet de la version précédente (v1) à l’adresse suivante : https://arduiblog.com/2023/06/19/eliobot/
Le robot Eliobot possède deux roues motrices à l’avant et une bille qui sert de roue libre à l’arrière. Sa batterie de 3,7 V (14500) est amovible et se recharge depuis la prise USB-C, qui sert également pour la programmation. Il dispose aussi d’un bouton-poussoir programmable, une LED RGB adressable (Neopixel), un buzzer, quatre détecteurs d’obstacles à infrarouge (trois à l’avant et un à l’arrière), une rangée de connecteurs sous le robot permettant d’accueillir un capteur de suivi de ligne (fourni avec le robot) et deux rangées de connecteurs dessus pour ajouter des cartes d’extensions (backpacks).
L’utilisation de l’interrupteur est très astucieuse. Vous pouvez...
Robots Zumo
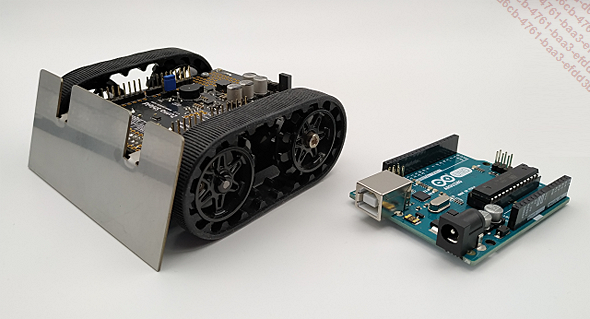
Les robots de la gamme Zumo sont compacts (moins de 10 x 10 cm) et légers. Ils sont équipés de chenilles et possèdent de puissants moteurs, puisqu’à l’origine ils sont conçus pour participer aux compétitions de mini-Sumo.
Le principe est très simple : deux robots s’affrontent sur une piste noire entourée d’un cercle blanc. Pour gagner, il suffit de réussir à pousser l’adversaire hors de la piste. Mais les robots étant autonomes, la stratégie et la conception du programme sont donc extrêmement importants.

Ce sont aussi d’excellents robots pédagogiques parce qu’ils sont fiables, robustes, faciles à réparer ou à améliorer. Pololu, le fabricant, propose plusieurs motorisations (pour pouvoir choisir entre vitesse et puissance) et offre même la possibilité d’assembler soi-même son robot acheté en kit.
1. Zumo shield
Il s’agit simplement d’une carte shield au format Uno. Vous avez bien sûr le choix entre l’Arduino Uno R3 et l’Arduino Leonardo, mais pas seulement. L’adaptateur Pico pour Zumo, qui offre la possibilité de programmer le robot en MicroPython, est une alternative très intéressante.
Malheureusement, la bibliothèque ZumoShield n’est toujours pas compatible avec l’Arduino Uno R4 (espérons qu’un jour le problème soit réglé par la communauté).
Le robot possède un accéléromètre trois axes, un magnétomètre, un buzzer, un bouton-poussoir et une LED programmables. Il peut aussi accueillir un module de suivi de ligne très performant (équipé de six capteurs infrarouge). L’alimentation est assurée par quatre piles (ou batteries rechargeables) au format AA. Elles sont situées sous le robot, dans un boîtier très facile d’accès. Leur remplacement est donc particulièrement aisé et ne nécessite pas d’outils ni de démonter une partie du robot.
a. Arduino Uno R3
La documentation officielle du robot Zumo a été traduite en français par Dominique Meurisse (de la boutique MC Hobby). Elle est disponible à l’adresse suivante...