
Le matériel utilisé
Introduction
Dans ce chapitre, nous allons parcourir rapidement quelques composants électroniques ainsi que les accessoires permettant de les interconnecter. Nous nous limiterons à ceux mis en œuvre dans les projets de cet ouvrage, la liste étant bien trop longue pour être abordée en entier.
La meilleure façon d’utiliser un composant électronique est d’avoir une idée de son fonctionnement, sans forcément entrer dans les détails de son intérieur profond. Cela permet de connaître ses limites d’utilisation, mais aussi ses atouts et ses faiblesses afin d’être capable de construire un projet fiable sans casse.
La platine d’essai
La platine d’essai, ou carte de prototypage, aussi appelée breadboard en anglais (« planche à pain » en français, en rapport avec sa multitude de trous) est l’un des éléments de base pour constituer et tester ses montages électroniques. Elle permet d’interconnecter des composants électroniques entre eux sans faire intervenir de soudure.
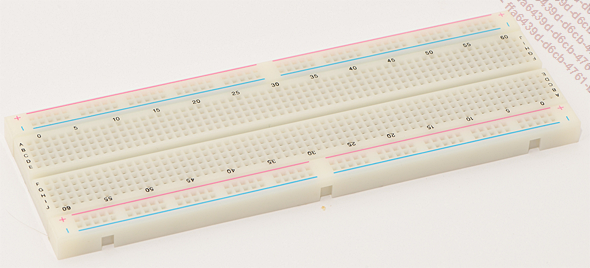
La platine se présente sous la forme d’une plaque d’environ 10 mm d’épaisseur, dont la face supérieure est recouverte de trous alignés. Chaque trou renferme une sorte de prise femelle pouvant accueillir une patte de composant électronique. La disposition des trous respecte les écartements standardisés du monde de l’électronique classique qui est calé sur des pas de 2,54 mm (1/10 de pouce). Nous parlons ici d’électronique classique, c’est-à-dire avec des composants traversants : les pattes des composants traversent le circuit imprimé pour être soudées sur la face arrière. Par opposition avec les CMS, composants montés en surface, soudés directement sur la surface sur laquelle ils sont posés. Ces derniers, très miniaturisés, sont très difficiles à manipuler à mains nues.
À l’intérieur de la platine d’essai...
Les fils Dupont
Ils permettent de réaliser des ponts électriques entre broches et composants. Ils sont généralement commercialisés sous forme de nappes, chaque fil disposant d’une couleur spécifique. Chaque extrémité est équipée d’un connecteur qui peut être de type mâle ou femelle. Il existe donc trois types de fils Dupont : des mâle/mâle, des femelle/femelle et des mâle/femelle.

Pour un premier achat, dirigez votre choix sur des femelle/femelle qui assureront la connexion au port GPIO du Raspberry 5. L’autre extrémité femelle pourra être utilisée telle quelle vers un autre module ou une carte disposant de broches mâles. Pour connecter vers une platine d’essai, équipez-vous éventuellement de changeurs de genre mâle/mâle convertissant une extrémité femelle en mâle. Toutefois, de simples queues de résistances coupées ou de petites portions de fils unifilaires totalement dénudés (que l’on trouve dans de vieux câbles téléphoniques ou Ethernet) feront aussi très bien l’affaire !
La longueur est aussi un critère important. Il faut parfois viser large pour autoriser de grandes courbures, et parfois être court pour limiter les nœuds. Pour les liaisons entre une platine d’essai...
La résistance
1. Principe
La résistance est un composant passif qui a pour principale fonction de s’opposer au passage du courant électrique. On peut la comparer à un nœud plus ou moins serré sur un tuyau d’arrosage souple. Elle prend généralement la forme d’un petit cylindre des extrémités duquel sortent les deux pattes.

2. Description
La valeur d’une résistance s’exprime en Ohms, le symbole de cette unité est la lettre oméga Ω. Quand cette valeur n’est pas explicitement imprimée, elle est codée sur le corps de la résistance avec quatre à six bagues de couleur qui définissent les premiers chiffres de la valeur, le multiplicateur et la tolérance. Voici le code couleur de ces bagues :
|
1re bague |
2e bague |
3e bague |
4e bague |
|
|
Couleur |
1er chiffre |
2e chiffre |
Multiplicateur |
Tolérance |
 Noir Noir |
0 |
0 |
100=1 |
|
 Marron Marron |
1 |
1 |
101 |
± 1 % |
 Rouge Rouge |
2 |
2 |
102 |
± 2 % |
 Orange Orange |
3 |
3 |
103 |
|
 Jaune Jaune |
4 |
4 |
104 |
|
 Vert Vert |
5 |
5 |
105 |
± 0.5 % |
 Bleu Bleu |
6 |
6 |
106 |
± 0.25 % |
 Violet Violet |
7 |
7 |
107 |
± 0.10 % |
 Gris Gris |
8 |
8 |
108 |
± 0.05 % |
 Blanc Blanc |
9 |
9 |
109 |
|
 Or Or |
0.1 |
± 5 % |
||
 Argent Argent |
0.01 |
± 10 % |
||
|
|
La première bague est la bague la plus proche d’une extrémité. Pour les tolérances inférieures à ± 2 %, une troisième bague est introduite en troisième position afin de définir un troisième chiffre. Il peut exister une sixième bague pour définir un coefficient de température.
Néanmoins, face à ce code couleur qui peut apparaître à première vue un peu déroutant et compliqué, il existe des séries de valeurs qui restreignent les valeurs de résistances dans une décade, et donc les combinaisons de codes couleur. La série la plus courante nommée E12 propose douze valeurs normalisées par décade, dont voici les deux premiers chiffres :
|
Code couleur des deux premières bagues |
Deux premiers chiffres |
|
 |
Marron Noir |
10 |
 |
Marron Rouge |
12 |
 |
Marron Vert |
15 |
 |
Marron Gris |
18 |
 |
Rouge Rouge |
22 |
 |
Rouge Violet |
27 |
 |
Orange Orange |
33 |
 |
Orange Blanc |
39 |
 |
Jaune Violet |
47 |
 |
Vert Bleu |
56 |
 |
Bleu Gris |
68 |
 |
Gris Rouge... | |
La diode LED
1. Principe
La LED pour Light Emitting Diode, ou « diode électroluminescente » en français, est une diode particulière qui émet de la lumière lorsqu’elle est traversée par un courant.

2. Description
Par définition, une diode n’est passante que lorsqu’elle est correctement polarisée. Dans le sens contraire, la diode bloque le courant. Par extension, la LED laisse passer le courant seulement dans le sens passant et ne s’illumine par conséquent que dans ce cas. Il existe donc un sens de branchement pour la LED.
Même dans le sens passant, il faut un minimum de tension pour « débloquer » le passage du courant. Cette tension appelée tension de seuil est différente en fonction de la couleur de la LED. Voici des ordres de grandeur de cette tension de seuil.
|
Type de LED |
Tension de seuil (V) |
|
Rouge |
1,6 |
|
Jaune |
2 |
|
Verte |
2 |
|
Bleue |
3 |
|
Blanche |
3,6 |
Généralement, c’est le fabricant qui publie ces tensions de seuil dans les caractéristiques électriques générales de la LED. Certains multimètres permettent aussi de mesurer cette tension de seuil. C’est bien utile avec des LED de récupération par exemple.
Le courant qui traverse la LED détermine le degré de luminosité. En règle générale, il ne faut pas dépasser 20 mA. Au-dessus, il existe un risque d’échauffement et de destruction irréversible de la LED.
Le symbole est celui de la diode auquel on adjoint deux petites flèches vers l’extérieur qui matérialisent l’émission de lumière par la diode.

Le sens passant est obtenu lorsque l’anode (côté triangle) est au potentiel positif...
Le transistor MOSFET
1. Principe
Le transistor MOSFET pour Metal Oxide Semiconductor Field Effect Transistor, ou « transistor à effet de champ à semi-conducteur métal oxyde » en français, est un composant à trois pattes particulièrement adapté à la commande de gros consommateurs électriques depuis une source de faible puissance.

Attention, quand nous parlons de gros consommateurs, tout est relatif. Ne pensez pas piloter directement des moteurs d’ascenseur ! Mais dans le cadre du Raspberry Pi 5 et de la limite des sorties GPIO à une dizaine de milliampères, il sera désormais possible de commander des composants dont la consommation est de l’ordre de l’ampère sous certaines conditions. De quoi utiliser de nombreuses LED blanches, un relais, etc.
2. Description
Pour simplifier, nous allons ici nous concentrer sur une seule référence de transistor MOSFET particulièrement adaptée aux caractéristiques des sorties GPIO du Raspberry Pi : le BS170. Nous détaillerons pourquoi au fur et à mesure de la description.
Chaque patte du MOSFET porte un nom : D, S et G respectivement pour Drain, Source et Grid (vous pouvez aussi rencontrer le terme de Gate).

Il existe deux types de transistor MOSFET, le type P et le type N qui, en gros, définissent la polarité des différentes...
Le bouton-poussoir et l’interrupteur
1. Principe
Le bouton-poussoir et l’interrupteur ont une fonction d’établissement de contact électrique sous une action mécanique généralement produite par un utilisateur.

Électroniquement, les deux sont identiques, la différence résidant dans le caractère momentané du bouton-poussoir : si plus d’action de l’utilisateur, le bouton-poussoir revient au repos. Dans le cas d’un interrupteur, c’est la mécanique interne qui ajoute la fonction de bascule.
2. Description
Que ce soit en poussoir ou en interrupteur, il existe une quantité infinie de formes, couleurs, et avec plus moins de pattes. L’idéal est de se référer à la documentation du fabricant pour connaître le brochage. Si uniquement deux broches sont disponibles, il n’y a pas vraiment de doute possible.
Voici le symbole général le plus utilisé :

Les boutons-poussoirs et les interrupteurs sont caractérisés par le courant et la tension qu’ils sont capables de couper et d’établir. Ils peuvent parfois coupler plusieurs liaisons électriques en même temps afin de commander plusieurs circuits électriques indépendants avec la même action mécanique. Dans ce cas, leurs symboles sont liés par une ligne discontinue....
La LED adressable
1. Principe
La LED adressable est un boîtier regroupant trois LED de couleurs rouge, verte et bleue, chacune pilotable en luminosité sur 256 niveaux.

Ensemble, elles permettent donc la génération des 16 millions de couleurs habituelles. Certaines LED adressables disposent en plus d’une LED blanche afin de pouvoir générer un vrai blanc, la combinaison des trois couleurs primaires n’offrant pas forcément un résultat vraiment blanc à l’œil.
2. Description
Pas de calcul de résistance à faire, elles sont toutes intégrées au boîtier. La LED adressable doit être alimentée via ses deux pattes d’alimentation + et - afin de fournir l’énergie nécessaire à l’ensemble des LED, ainsi qu’au circuit de pilotage interne. Certains boîtiers fonctionnent en 5 volts, d’autres en 12 volts.
Pour le piloter, chaque boîtier dispose d’une broche d’entrée Din qui recevra un signal série composé de trois octets représentant les valeurs rouge, verte et bleue à produire. Pour les boîtiers avec une LED blanche supplémentaire, il y a aura quatre octets à fournir sur la broche Din.
Toute seule, une LED adressable ne présente pas vraiment d’intérêt. Son principal avantage réside dans...
Les rubans et anneaux de LED adressables
1. Principe
Nous l’avons vu au paragraphe précédent, la LED adressable n’a d’intérêt que dans une chaîne. Il existe donc des rubans de LED découpables aux ciseaux permettant de disposer d’un ensemble de LED pilotables en couleur et en luminosité.

D’autres formats comme l’anneau ou la barre existent, avec un nombre de LED fixes.

2. Description
Bien sûr, l’anneau ou la barre disposent aussi d’une sortie Dout afin de pouvoir chaîner plusieurs anneaux ou barres ensemble. Il faut donc les voir comme un ensemble qui peut lui aussi être chaîné avec d’autres constitués du même type de LED. Eh oui, pour que la chaîne fonctionne, toutes les LED d’un ensemble et de tous les ensembles doivent être identiques. Les caractéristiques de l’ensemble (tension d’alimentation, consommation de courant, etc.) sont donc définies par les caractéristiques d’une LED.
3. Utilisation
Les rubans doivent disposer impérativement de leur propre alimentation électrique. En effet, chaque LED peut consommer, en fonction des références, jusqu’à 60 mA à pleine luminosité. Multiplié par trois pour chaque boîtier adressable et par le nombre total de LED, cela dépasse très rapidement...
Le servomoteur
1. Principe
À l’inverse d’un moteur classique qui tourne indéfiniment du moment qu’on l’alimente en énergie électrique, le servomoteur est un ensemble mécanique doté d’un moteur électrique qui est capable de maintenir une position angulaire donnée.

Cette position angulaire est vérifiée plusieurs fois par seconde, voire corrigée en fonction de l’effort appliqué sur son axe afin de toujours être au plus proche de la position envoyée de manière électronique.
Les servomoteurs sont à différentier des moteurs pas à pas. Ces derniers peuvent faire tourner leur axe plusieurs tours de suite. Un servomoteur ne dépassera jamais le débattement prévu par son fabricant qui peut être au maximum d’un tour, soit 0 à 360°.
2. Description
Les servomoteurs sont très utilisés en modélisme par exemple. Ils disposent en accessoires de différents bras de levier ou de roues perforées interchangeables sur leur axe. Un servomoteur est caractérisé par son angle de débattement maximal, exprimé en degrés.
3. Utilisation
Nous allons utiliser dans cet ouvrage une référence très courante : le SG90.
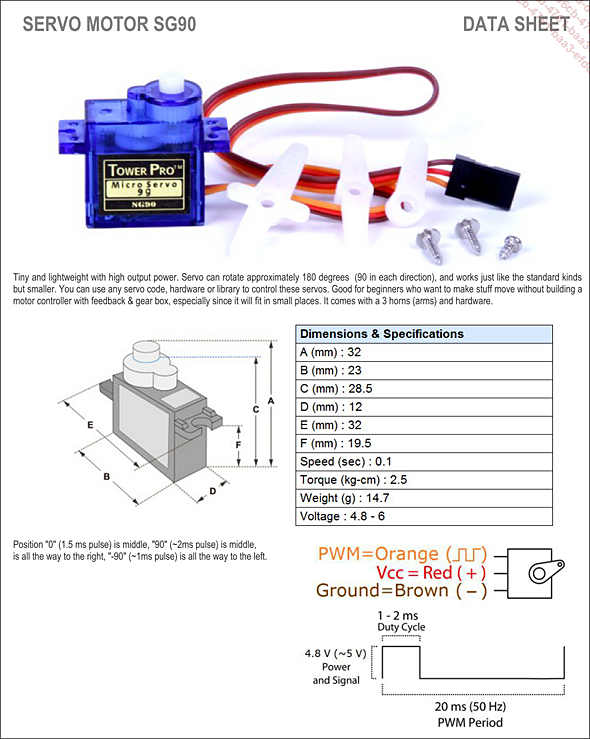
De nombreux clones existent avec des références différentes selon...
Le codeur rotatif absolu
1. Principe
Un codeur rotatif est un composant qui transforme la position de son axe en une valeur numérique.

Le codeur rotatif absolu va donc présenter sur ses sorties une valeur numérique en binaire représentative de la position de son axe.
2. Description
Il existe de nombreux codeurs rotatifs absolus. Leurs principales caractéristiques sont :
-
leur précision, c’est-à-dire l’angle minimal qui fera passer la sortie d’une valeur à une autre ;
-
la présence ou non d’une butée.
Le modèle ci-dessus est sans butée : vous pouvez tourner l’axe autant de tours que vous voulez dans un sens sans être bloqué mécaniquement. La valeur de sortie revient à zéro à chaque tour. Il possède huit sorties : il est donc capable de coder 128 positions angulaires. Sa précision est d’un peu moins de 3° (2,8125° pour être précis). Il faudra tourner l’axe de 3° pour passer d’une valeur à la suivante. Sa structure mécanique interne est conçue pour produire un code binaire qui n’est pas linéaire, mais répond à une table de vérité un peu déroutante au début. Néanmoins, après conversion logicielle, vous disposerez d’une valeur entre 0 et 127, plus représentative...
Le codeur incrémental
1. Principe
En apparence, un codeur incrémental est similaire à un codeur absolu, au nombre de pattes près.

En effet, il ne dispose que de trois pattes. De ce fait, il est impossible de connaître la position absolue de son axe. Lors d’un mouvement, généralement ponctué de crans, il transmet simplement un sens de rotation.
2. Description
Comme pour le codeur absolu, les principales caractéristiques sont sa précision angulaire, c’est-à-dire le nombre de crans présents par tour, l’absence de butée, et le fait qu’il ne mémorise pas de valeur d’angle. C’est au logiciel de gérer une valeur qui sera initialisée au démarrage.
Le mouvement de l’axe va générer deux signaux carrés sur les deux sorties, le signal sur la sortie B étant légèrement déphasé par rapport à la sortie A.
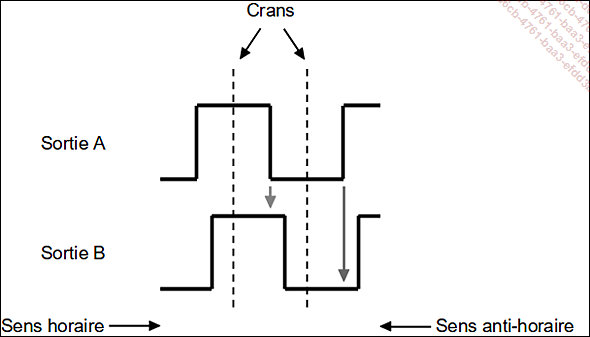
Le principe est de comparer les niveaux des sorties juste après un changement d’état de la sortie A. Si les niveaux sont différents, c’est un mouvement en sens horaire, si les niveaux sont égaux, c’est un mouvement en sens anti-horaire.
3. Utilisation
Là encore, il convient de voir ce codeur comme deux boutons-poussoirs. Leur patte commune est mise à la masse et leurs deux sorties reliées à deux...
La carte Sense HAT
La carte additionnelle Sense HAT est une carte conçue par la Fondation dès le début de l’histoire Raspberry Pi. Elle regroupe dans un seul circuit imprimé bon nombre des composants décrits dans ce chapitre, ainsi que quelques capteurs supplémentaires que nous allons lister.

Conçue pour être enfichée sur le port GPIO du Raspberry Pi, elle dispose des mêmes trous de fixation que la carte Raspberry Pi, ce qui facilite une fixation solide via des entretoises. Elle dispose même d’une fente pour le passage d’une nappe de caméra vers le connecteur CSI.

Au premier regard, on distingue clairement une matrice de 8x8 LED. Ce sont des LED RVB pilotables individuellement.
Un bouton en forme de joystick est implanté en bas à droite de la matrice de LED et offre cinq fonctions différentes : gauche, droite, haut, bas et le clic avec l’appui vertical.
Elle embarque en plus les capteurs suivants :
-
Un gyroscope : il permet de déterminer la position angulaire selon deux axes dans le plan du circuit de la carte.
-
Un accéléromètre : il mesure l’accélération. Pour simplifier, une valeur nulle indique une vitesse de déplacement nulle ou constante de la carte. Une valeur différente de zéro indique une accélération, donc une augmentation de la vitesse...
Conclusion
Nous venons de parcourir une petite liste de composants électroniques permettant de démarrer quelques expérimentations simples. Voyons maintenant comment les utiliser côté logiciel.